2026年4月18日,第十九届中国电子信息年会“具身智能与机器人”专题论坛在湖北省武汉市中国光谷科技会展中心成功举办。论坛由清华大学自动化系主办、具身智能系统北京市重点实验室和清华大学具身智能与机器人研究院承办。论坛主席由中国工程院院士、华中科技大学陈学东教授担任,执行主席由清华大学鲁继文教授和张涛教授共同担任。论坛邀请了来自北京大学、同济大学、北京理工大学、中国科学技术大学等从事具身智能、无人系统、世界模型、智能机器人等研究的八位专家作专题报告,系统展示了具身智能与机器人领域的最新研究进展。
上海大学谢少荣教授分享了题为“海洋自主智能无人艇”的报告。报告围绕海洋场景下无人艇集群的协同需求,介绍了在多艇任务分配、协同感知、编队控制与复杂海况适应等方面的研究思路,展示了具身智能技术在海洋装备与海上自主作业中的应用潜力。

北京大学喻俊志教授分享了题为“仿生四足机器人广域环境感知与具身导航”的报告。报告聚焦四足机器人在复杂环境中的稳定运动问题,介绍环境感知、状态估计与运动控制的协同设计思路,强调了具身感知与实时控制紧密耦合对机器人机动性和鲁棒性的重要作用。

同济大学何斌教授分享了题为“机器人具身感知与导航”的报告。报告围绕复杂开放场景中的自主导航问题,讨论了面向全空间任务的环境理解、路径规划与导航决策方法,展示了具身智能在跨场景、跨平台无人系统中的导航能力提升方向。

北京理工大学孙健教授分享了题为“自主无人系统智能控制”的报告。报告从自主无人系统的控制需求出发,介绍了面向复杂任务的感知融合、决策优化与闭环控制思路,展现了智能控制方法在提升无人系统自主性、稳定性和任务执行效率方面的价值。

中山大学林倞教授团队分享了题为“Vision-Language Intelligence in World Model”的报告。报告重点介绍了如何通过观察视觉语言模型中的模式,做出针对性的改进以提升模型在世界模型应用中的表现。
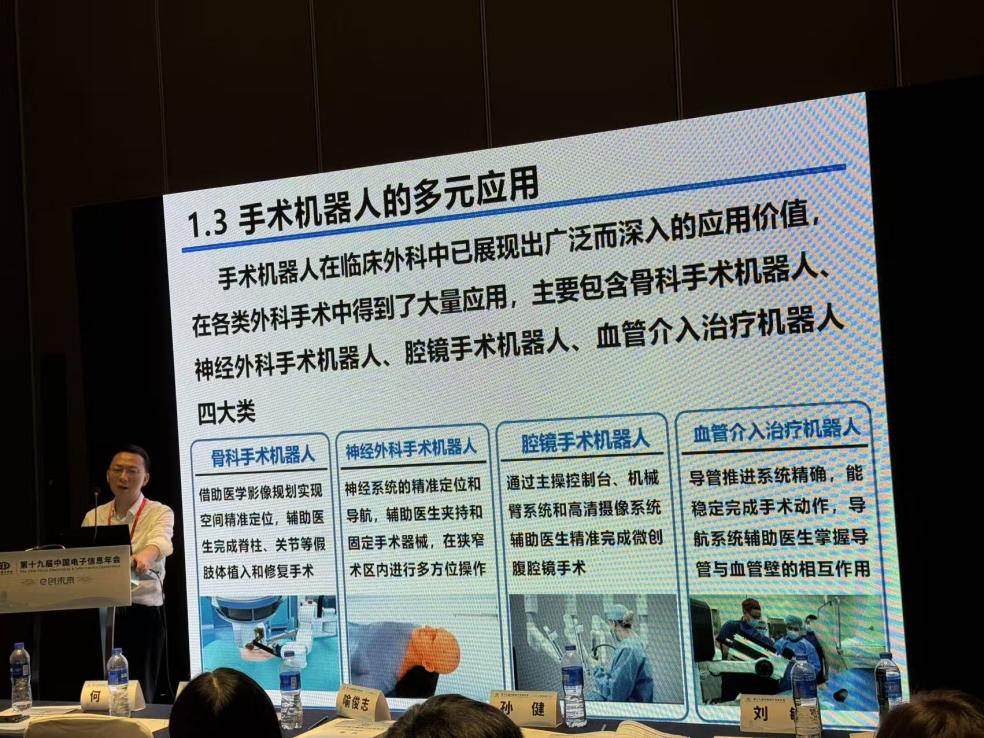
湖南大学刘敏教授分享了题为“具身手术机器人初探”的报告。报告面向医疗机器人这一高要求场景,介绍了在精细操作、交互感知与安全控制方面的初步探索,体现了具身智能技术在高精度机器人系统和临床辅助应用中的发展潜力。
中国科学技术大学秦家虎教授分享了题为“面向复杂动态环境的自主无人机感知、决策与控制”的报告。报告围绕动态环境中的移动机器人自主运行问题,介绍了任务约束下的路径生成、轨迹优化与控制执行方法,展示了规划与控制一体化设计对提升机器人运动性能和场景适应性的意义。

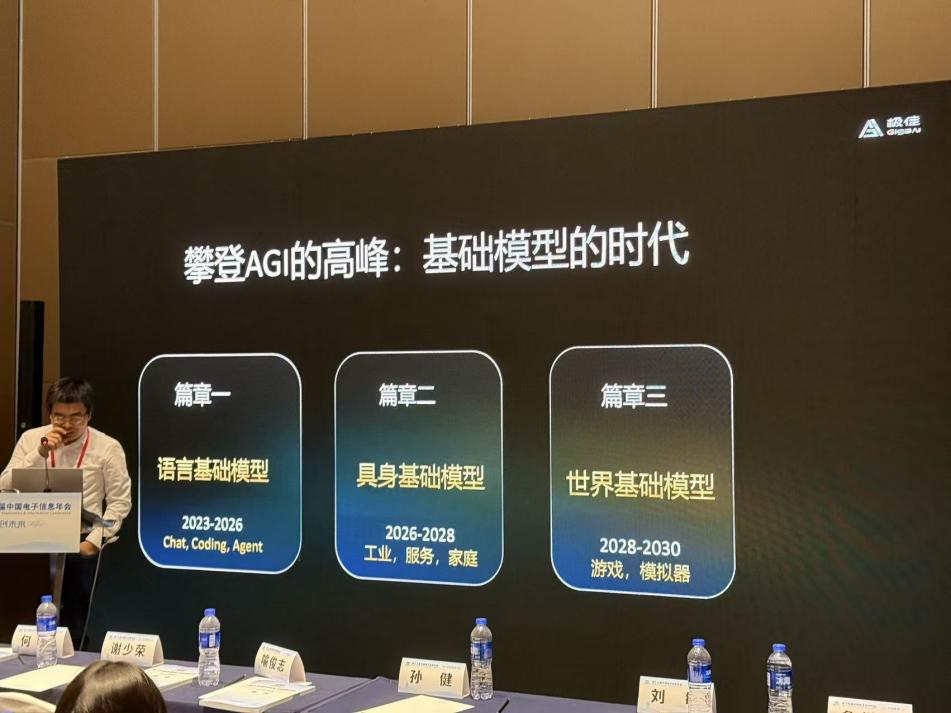
北京极佳视界科技有限公司首席科学家朱政博士分享了题为“世界模型驱动的具身智能基础模型”的报告。报告围绕具身智能基础模型的发展趋势,介绍了以世界模型为核心连接感知、理解与行动的技术思路,讨论了基础模型在统一表征、多任务泛化和复杂交互中的潜在价值。